











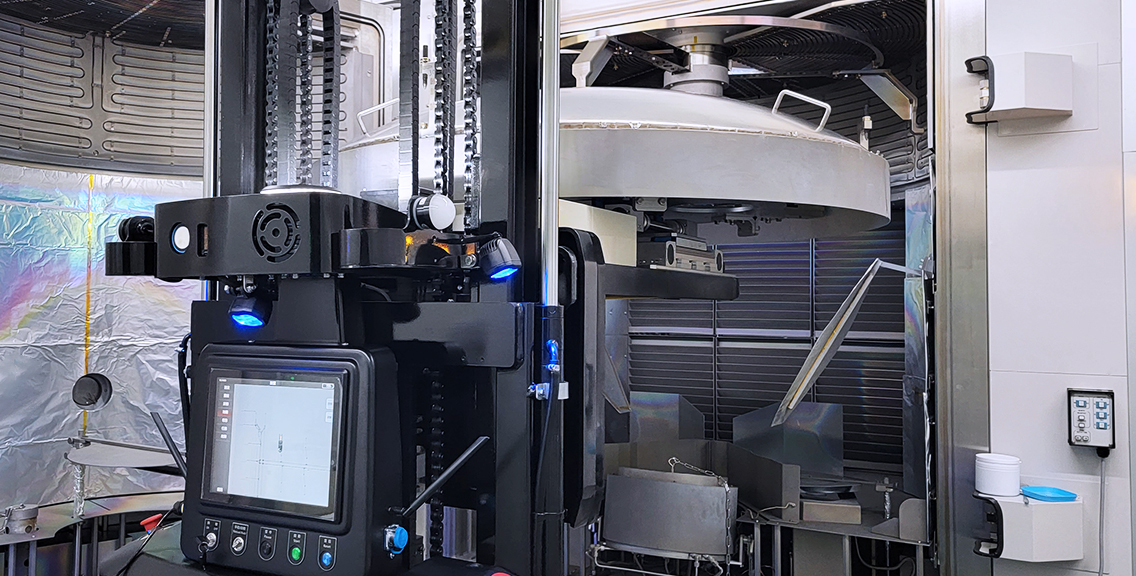
![[고정밀 설비와의 도킹] 비전나비로보틱스의 로봇이 광학 코팅 현장에 적용되어 제조 공정 자동화에 기여하다.](images/b2.png)
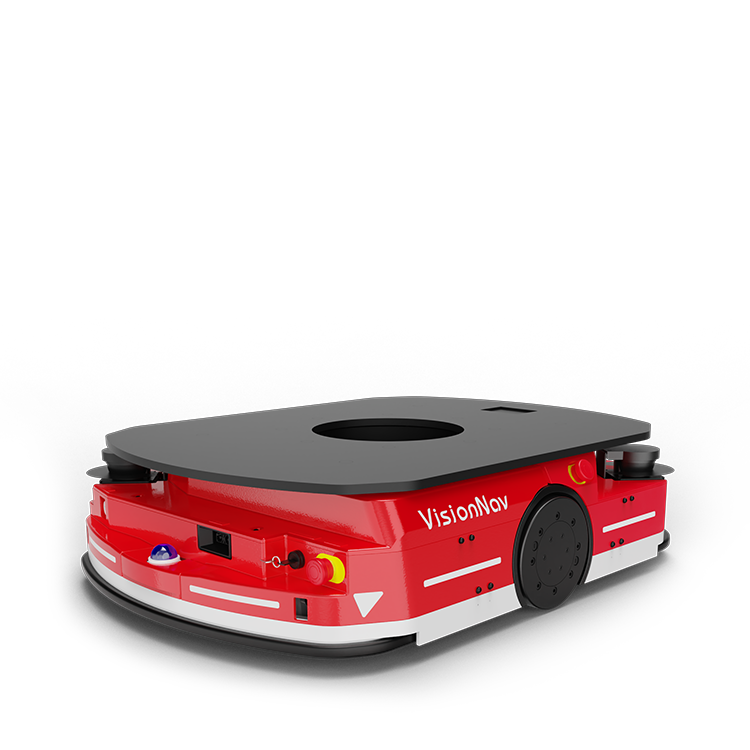
VNSL14
슬림 타입 스태커
제조업 특성상 제조 공정을 구성하는 물류는 다양한 제품과 여러 종류의 공정 설비들이 굉장히 복잡하게 얽혀서 운영되는 환경입니다. 특히, 일부 특수 제조 산업에서는 고정밀도의 사양을 요구하고 있으며, 해당 환경에서 공정 물류 자동화를 위해서 적용되는 [무인지게차]또한 높은 수준의 정밀도를 유지해야 합니다.
오늘은 무인지게차 전문 글로벌 기업인 [비전나비로보틱스]가 [광학 코팅 산업]에 적용한 로봇이 어떤 로봇인지 어떻게 운영되는지에 대해서 소개하려고 합니다. 해당 프로젝트에서 비전나비로보틱스의 로봇은 비정형화되어 있는 제품을 운반하는 역할을 하고 있으며, 고정밀도를 요구하는 제조 설비와 도킹하여 스마트한 공정 물류를 실현하고 있습니다.

솔루션:
본 프로젝트의 고객사는 반도체 광학 코팅, 광학적 저주파 대역 통과 필터(OLPF), 얇은 막 광학 코팅 등의 분야에서 제품 연구 개발 및 생산을 주로 하는 업체로서, 현장의 환경은 기본적으로 크린룸으로 구성되어 있고, 해당 현장에서 운영되는 설비도 크린환경에 적합해야 하는 상황입니다. 이에 비전나비로보틱스는 해당 현장 환경을 분석하여 그에 대응할 수 있는 VNSL14(Slim형 무인지게차)로봇을 선정하였고, 해당 로봇의 Fork를 현장 상황에 맞게 커스터마이징하였습니다. 또한 RCS2.0 중앙 제어 스케줄링 시스템을 도입하여 VNSL14(Slim형 무인지게차)로봇이 고정밀도의 코팅 설비와 이상 없이 도킹하고 설비 내에 위치한 스테이션에 대해서도 고정밀도의 Loading & Unloading 작업을 진행할 수 있도록 하였습니다.

무인지게차 적용 대상 물류 프로세스 :


코팅 설비 챔버 연동 :
* VNSL14 무인지게차가 코팅 설비 챔버로 이동할 때, 챔버 하부의 가이드 레일을 따라서 이동하도록 하여, 보다 정밀한 챔버 진입을 할 수 있도록 구성하였습니다.
* VNSL14 무인지게차가 챔버 위치에 도달하면, 포크를 1,903±3mm의 높이 범위로 올려서 제품 이송 작업을 수행합니다. 이송 작업이 완료되면 중앙 제어 시스템을 통해 상위 시스템에 이송 완료 보고를 진행합니다.
* 코팅 설비는 상위 시스템에서 전송된 이송 작업 완료 정보를 수신하고, 설비 내 챔버에 있는 걸쇠와 제품에 있는 걸쇠를 정확하게 연결할 수 있도록 걸쇠를 이동시키고 다시 무인지게차에게 제품을 내리도록 명령합니다.
* 무인지게차는 명령을 받고 나서 각 걸쇠들이 완전히 연결될 수 있도록 제품을 내리며, 제품과 챔버 걸쇠가 연결되면 다시 대기장소로 돌아가거나 다음 명령을 수행하도록 이동합니다.
프로젝트 핵심사항:
비즈니스 커넥션
Vivian
01098352225
infokorea@visionnav.com