












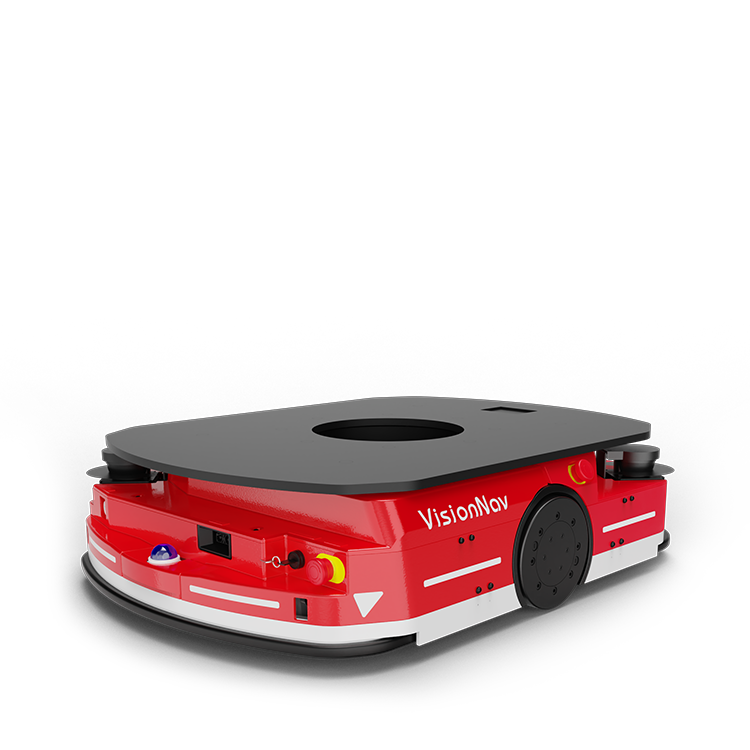

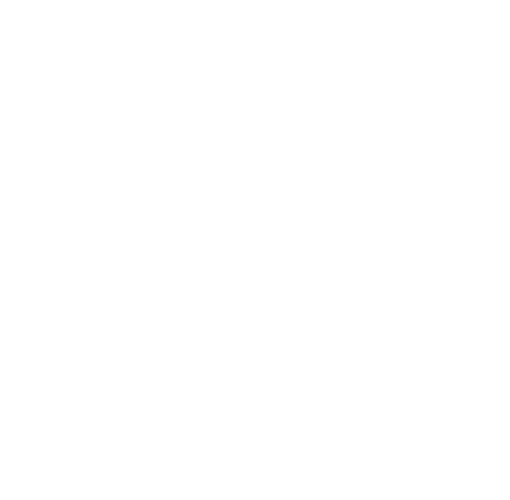
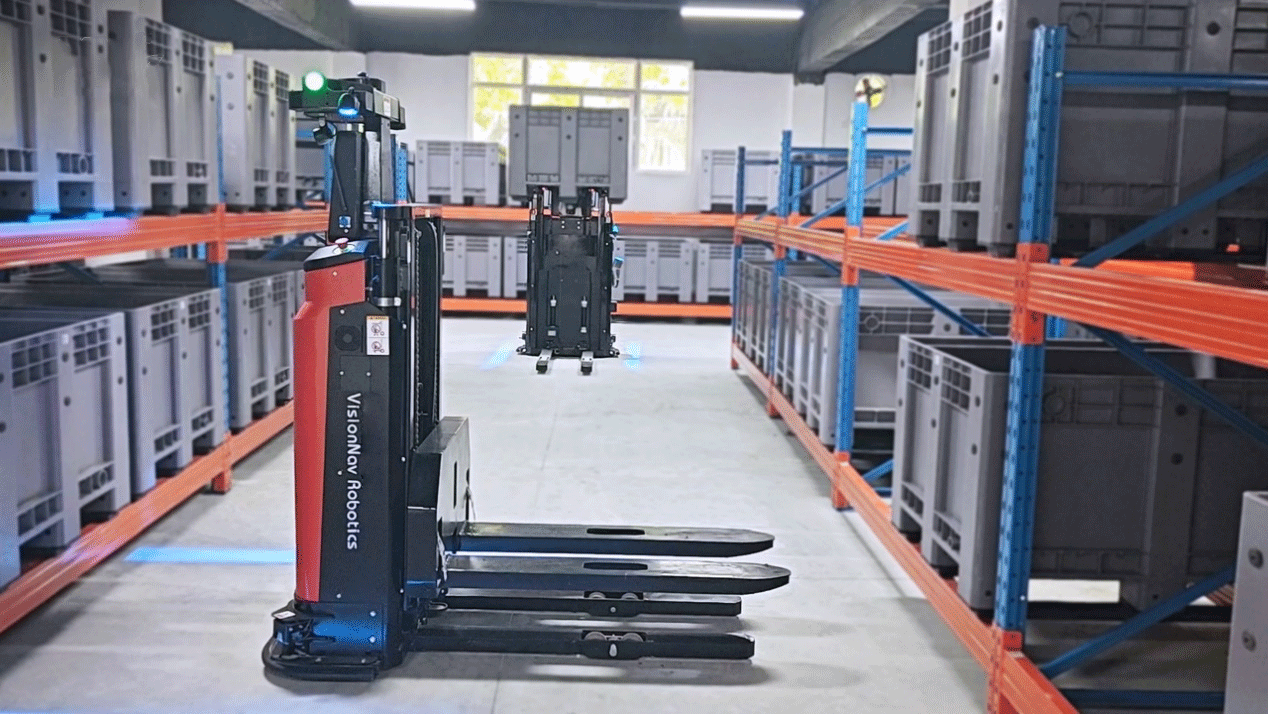
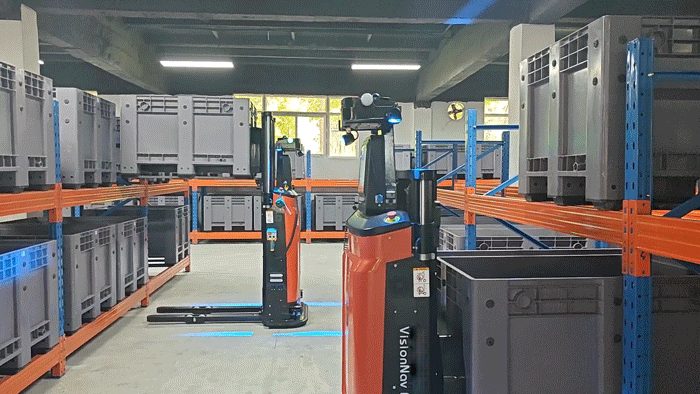
VNSL14
슬림 타입 스태커

글로벌 선두기업이자 세계 최고의 내부 물류 솔루션 공급업체인 비전나비 로보틱스는 기계 제조 분야에서 풍부한 프로젝트 경험을 보유하고 있으며 시장의 다양한 산업 분야의 고객으로부터 높은 신뢰를 얻고 있습니다. 최근 비전나비 로보틱스는 기계 제조 산업에서 스마트 공장 개조 및 업그레이드 프로젝트를 또 한 번 성공적으로 추진했습니다. 해당 프로젝트에서는 VNSL팔레트 스택 로봇, RCS2.0 중앙 제어 스케줄링 시스템, 그리고 창고 관리 시스템을 고객에게 제공하여 자재 입출고 자동 관리를 실현했습니다.
프로젝트 배경
이 프로젝트는 중국 서북 지역에 위치하고 있으며 고객의 창고는 입고 버퍼 영역과 선반 저장 영역으로 구분 됩니다. 개조 이전에는 자재의 입고 및 출고 과정에서 창고 관리 시스템이 부족했으며, 창고의 디지털화 관리 수준이 낮았습니다. 자재의 이동과 저장은 완전히 수동으로 이루어졌으며, 인력에 의존하여 자재 정보를 입력하고 처리하였기 때문에 시간과 노력이 많이 소요될 뿐만 아니라 정보가 혼란스럽고 오류가 발생하기 쉬웠습니다. 고객은 비전나비 로보틱스의 내부 물류 자동화 솔루션을 도입하여 창고의 자동화 및 지능화 관리를 실현하고자 했습니다.
프로젝트 프로세스
수동 조작 단계:
RCS2.0 중앙 제어 스케줄링 시스템의 자동 조작 단계:
출고 프로세스:
수동 조작 단계:
RCS2.0 중앙 제어 스케줄링 시스템의 자동 조작 단계:

잔재반입:
수동 조작 단계:
RCS2.0 중앙 제어 스케줄링 시스템의 자동 조작 단계:

프로젝트 가치
비전나비 로보틱스의 내부 물류 자동화 솔루션은 고객의 니즈와 현장 상황을 종합적으로 검토하여 VNSL14 무인지게차를 도입 하였습니다. 3D SLAM 솔루션을 기반으로 프로젝트 현장에서 VNSL14의 자율 위치 결정 및 내비게이션을 실현하였고 이로써 QR 코드를 부착하거나 프로젝트 현장의 보수 공사 없이 프로젝트에 투입 될 수 있었습니다. 고객의 현장에서의 창고 관리에 대한 복잡한 문제를 해결하기 위해 RCS2.0 스케줄링 시스템 및 위치 관리 시스템을 제공하여 자동 입출고 관리를 구현하였고 이를 통해 더욱 디지털화되고 지능적이며 세분화된 관리가 가능한 스마트 공장을 구축했습니다.
비즈니스 커넥션
Vivian
01098352225
infokorea@visionnav.com