












VNP15(VL)-66
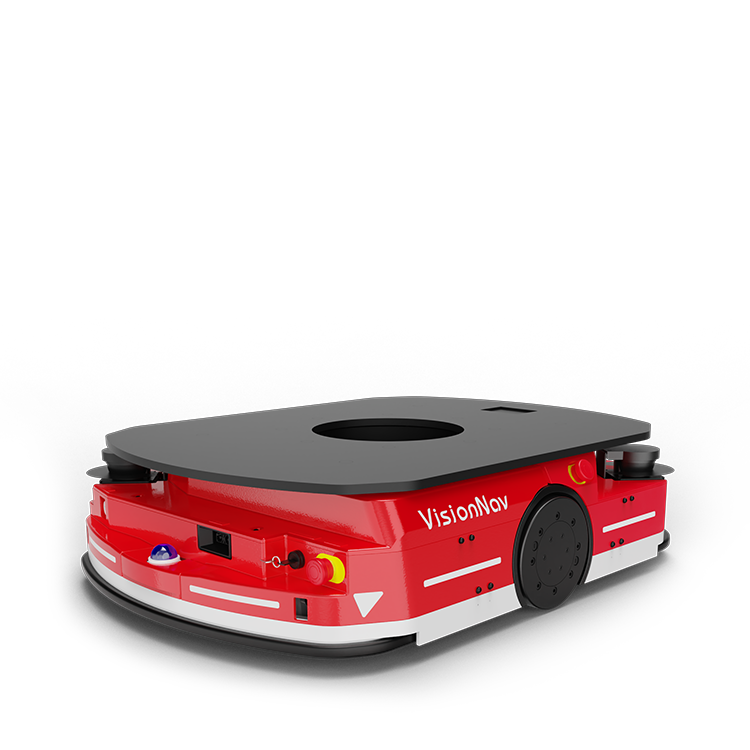
VNP15(VL)-66카운터밸런스(실내) 타입 무인지게차
공장 내 물류에서는 파렛트가 있는 화물도 있지만, 파렛트 없이 적재된 화물도 많습니다. 무인지게차가 무(無)파렛트 화물을 집게 될 때에는 다음과 같은 난점이 있습니다.
이번에 소개할 사례는 중국 서남권의 한 유명 금속 제조사 현장입니다. 비전나비의 최신 자가개발 **VNP15(카운터밸런스 스태커형 무인지게차)**가 무파렛트 화물의 형상·적층 상태를 정밀 인식하여 고효율·고안전 이송을 구현했습니다.
프로젝트 배경
고객사는 남서부 지역의 한 유명 금속 제조업체입니다. 공정에서 다루는 자재는 운반 장비(팔레트) 없이 적층된 은색 주석 블록이며, 규격은 500 × 550 × 608 mm입니다. 현장에는 3개 생산 라인이 있고 컨베이어 상면 높이는 680 mm입니다. 고객은 비전나비로보틱스의 자가개발 VNP15(카운터밸런스 스태커형) 무인지게차 여러 대와 RCS 2.0 중앙관제·스케줄러를 도입해, 주석 블록의 하선(오프로더) → 자동 입고/보관까지 전 과정을 무인화했습니다.

프로젝트 프로세스
1) 하선(오프로더)
결과에 따라 양품 구역 또는 불량 구역으로 자동 분류·이송합니다.

2) 입고(보관)

사업 가치
고정밀·유연 포크 인입, 안정 운반

지능형 스케줄링으로 창고 효율 향상

복잡 환경에 대한 높은 적응성

|
|
|