











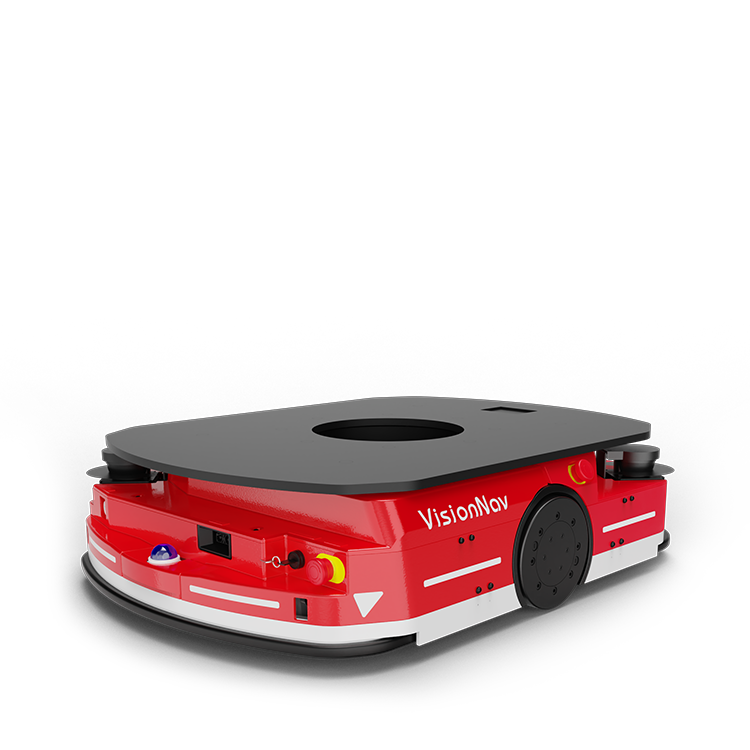

VNST20
초소형 슬림 팔레트 잭 무인지게차
대표적인 소비재 산업 중 하나인 포장 제조업은 대량 생산, 유연 생산(Flexibility), 정밀 보관 체제로 빠르게 패러다임이 전환되고 있습니다. 기존 제조 환경에서는 생산라인 간 자재 연계와 창고 내 자재 운송을 인력에만 의존하며, 작업 효율 저하, 인건비 상승, 적재 정밀도 부족, 자재 흐름 지연 등의 문제들이 발생하였기에, 생산라인의 고속 생산 주기를 맞추기 더욱 어려웠습니다. 이러한 물류 운송 문제를 해결하고 전 공정의 표준화·고효율 작업 실현을 위하여, 유명 포장 소재 업체인 A사는 VisionNav Robotics와 협력하여 공장 내 물류 자동화 시스템을 구축하였습니다. 이를 통해 생산 라인과 창고 물류를 유기적으로 연계, 포장 제조업계의 대표적인 스마트 팩토리 벤치마킹 사례를 창출했습니다.
이번 프로젝트가 진행된 공장은 주로 병몸체(preform), 병뚜껑 등 포장재를 생산하여, 원자재 및 완제품의 생산부터 보관, 이송에 이르는 전 공정을 아우릅니다. 1, 2층 간 층간 이동 작업, 다양한 제조 설비와의 연계, 다단 적재를 위한 쌓기 및 분리 등 복잡한 작업 환경이 특징입니다.
이러한 공정들을 수행하기 위해 VisionNav Robotics는 20대 이상의 무인 지게차에 RCS 2.0 중앙 관제 시스템, 스마트 로케이션 관리 모듈, 환경 모니터링 시스템을 결합하여 자재 입고부터 적재, 보관, 출고, 생산라인 투입, 회수까지 공장 내 모든 물류 시나리오 자동화에 성공하였습니다.
포장기 배출구에 프리폼 적재함이 가득 차면, 해당 설비는 RCS 2.0 시스템에 자재 이송 요청 신호를 보냅니다. 신호를 수신한 시스템은 무인지게차VNST20을 제어하여, 배출구의 가득 찬 적재함을 임시 보관 구역으로 이송합니다. 동시에 시스템은 다른 VNST20가 공적재함 버퍼 구역에 있던 빈 적재함을 배출구로 신속하게 보충하도록 지시 및 제어합니다.
밀봉·포장 구역에서 작업자가 자재 및 라벨 정보를 확인한 후 밀봉 처리를 완료하면, RCS 2.0 시스템에 입고 요청 신호를 전송합니다. 신호를 받은 VNST20은 밀봉 버퍼 구역에서 작업이 완료된 프리폼을 적재 구역으로 운반합니다. 적재 구역 내 동일 라인(열)의 4개 로케이션이 모두 가득 차면, 자동으로 입고 작업이 실행(트리거)됩니다. 이어서 VNP15 무인 지게차가 만재된 적재함을 1+1로 쌓아 보관 구역으로 운반한 후, 다시 2+2로 쌓아 병몸체 입고 절차를 완료합니다.
병몸체 호퍼(tipper)에서 자재 공급 요청 신호가 발생하면, RCS 2.0 시스템은 2대의 VNST20 무인 지게차를 지시하여 언패킹(Unpacking) 구역에 대기 중인 프리폼 2팔렛트(Pallet)를 호퍼 내부로 이송합니다. 호퍼 설비가 자재 덤핑(투입)을 완전히 마치면, VNST20 지게차가 비어 있는 적재함을 회수하여 공적재함 버퍼 구역으로 이송합니다. 이 과정에서 VNST20 지게차는 자재를 투입하거나 빈 적재함을 회수하기 전, 반드시 호퍼의 신호 모듈과 실시간 안전 신호 확인을 수행하며, 양측 모두의 안전이 확보된 상태에서만 작업을 진행합니다.
언패킹 구역으로 병몸체가 호퍼에 투입되면, RCS 2.0 시스템은 자동으로 병몸체 출고 작업을 트리거하여 VNST20 무인 지게차가 병몸체 버퍼 구역에서 가득 찬 적재함을 언패킹 구역으로 운반하여 보충하도록 합니다.
2층의 병뚜껑 버퍼 구역에서 보충 작업이 트리거되면, RCS 2.0 시스템은 VNP15 무인 지게차에 지시하여 1층 병뚜껑 보관 구역에서 한 번에 2단으로 쌓인 병뚜껑 적재함을 엘리베이터 내로 운반합니다. 엘리베이터가 2층에 도착하면 다시 VNP15 무인 지게차가 엘리베이터에서 적재함을 꺼내 병뚜껑 버퍼 구역으로 옮겨 보충을 완료합니다.
병뚜껑 호퍼에서 자재 투입 필요 신호가 발생하면, RCS 2.0 시스템은 2대의 VNST20 무인 지게차에 지시하여 병뚜껑 언패킹 구역 로케이션에서 언패킹이 완료된 병뚜껑을 호퍼로 운반합니다. 호퍼가 자재를 모두 쏟아내면 빈 적재함을 꺼내 빈 적재함 버퍼 구역으로 운반합니다.
이 과정에서도 VNST20 무인 지게차는 적재물을 내리거나 빈 적재함을 가져가기 전에 호퍼의 신호 모듈과 안전 상호 확인을 반드시 수행합니다.
언패킹 구역으로 병뚜껑이 호퍼에 투입되면, RCS 2.0 시스템은 자동으로 병뚜껑 출고 작업을 트리거하여 VNST20 무인 지게차가 병뚜껑 버퍼 구역에서 가득 찬 적재함을 언패킹 구역으로 운반하여 보충합니다.
작업자가 1층의 회수용 병몸체를 적재함에 담은 후, 병몸체 회수 입고 요청 신호를 전송하면, RCS 2.0 시스템은 1층의 VNP15 무인지게차를 제어하여, 회수 구역(로케이션)에서 2단 으로 쌓인 가득 찬 적재함을 엘리베이터 내로 운반합니다. 엘리베이터가 2층에 도착하면 다시 VNP15 무인 지게차가 엘리베이터에서 적재함을 꺼내 병몸체 보관 구역으로 옮깁니다.
이번 프로젝트는 유연 생산과 스마트 물류창고(보관)를 지향하는 공장 내부 물류의 체계적인 자동화 사례로, VisionNav Robotics가 빠르게 소비되는 포장 소재 업계에 스마트 물류(로지스틱스)의 새로운 표준을 제시했다는 점에서 큰 가치가 있습니다.
본 프로젝트에는 17대의 VNST(좁은 통로 팔레트 운반형) 무인 지게차와 6대의 VNP15(균형 중량식 적재형) 무인 지게차가 투입되었습니다. RCS 2.0 중앙 관제 시스템이 20대 이상의 무인 지게차를 통합 제어하고, 약2,000여개의 로케이션 자재 입출고를 관리함으로써, 생산라인 주기와 AGV의 동선 및 모션을 섬세하게 최적화하였습니다. 그 결과, 고빈도·다중 작업 동시 수행 상황에서도 안정적인 생산량과 처리량을 유지할 수 있게 되었습니다.
엘리베이터 내 인력과 장비의 혼재, 다단 적재 시 허용 오차 한계, 플라스틱 덮개로 인한 적재물 가려짐 등 다양한 현장 조건에서 발생할 수 있는 변수들에 대해, VisionNav Robotics는 환경 모니터링 시스템을 도입하여 인력, 차량, 자재 각각의 안전 경계를 명확히 정의하고 안전 관리의 폐쇄 루프(closed-loop)를 구축했습니다. 특히 VNP15 무인 지게차에 탑재된 3D 레이저 인식 및 고정밀 제어 기술은 다단적재 및 분리, 적재함 인식 과정에서 발생할 수 있는 불확실성을 단계적으로 제거하여 작업의 정밀도와 안정성을 동시에 확보하는 성과를 거두었습니다
캡(병뚜껑)과 프리폼(병몸체)류 제품 생산은 포장 제조뿐만 아니라 식음료, 유통 등 다양한 업종에서 이루어집니다. 이번 프로젝트에서 해결된 생산라인 주기의 끊김 없는 연계, 변형되기 쉬운 적재함의 다단 적재 등 고난도 과제들은 해당 업계가 공통으로 직면하고 있는 문제들입니다. VisionNav Robotics가 제공하는 솔루션은 단순한 장비 공급을 넘어, 동종 업계의 타 작업장에서도 신속하게 도입 및 재현할 수 있는 '표준 내부 물류 자동화 모델'입니다. 이를 통해 포장 제조 산업의 스마트 물류 고도화를 한층 더 가속할 것으로 기대됩니다.
|
|
|